
Soft robots are moving from laboratory prototypes into farms, clinics, and flexible production lines, but their performance depends on something deceptively small: how accurately air is switched, held, and released. In pneumatic systems, miniature solenoid-actuated valves translate electronic commands into controlled motion across elastomer chambers operating at modest pressures, often around 50 to 300 kPa. The latest latching and multi-stable coil designs are especially relevant in Europe’s research and automation landscape because they reduce power draw, limit heat near delicate materials, and extend battery life in mobile or wearable platforms. This article examines how these components work, where they are being applied, and what engineers should know before specifying them.
Miniature Multi-Stable Components in Pneumatic Soft Robotics
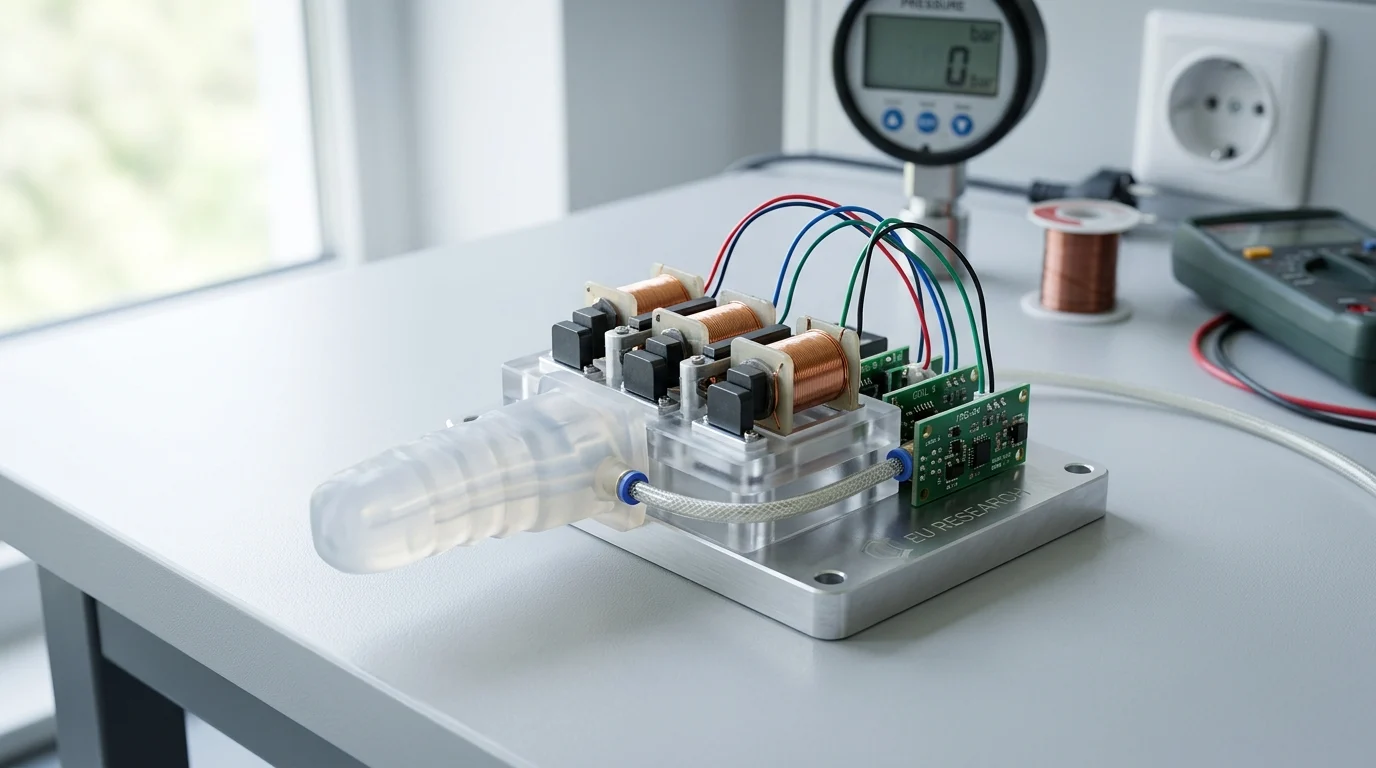
Pneumatic soft robotics represents a paradigm shift in automation, prioritizing compliant, biomimetic structures over rigid mechanical linkages. These systems rely on the precise control of compressed air or fluids to actuate elastomeric networks, enabling safe human-robot interaction and the handling of fragile objects. A critical enabling technology for these systems is the miniature solenoid-actuated valve, which regulates fluidic flow within highly constrained footprints.
Specifically, miniature multi-stable solenoid coils—and the valves they actuate—are gaining traction across European research initiatives and industrial automation sectors. By allowing valves to maintain specific states without continuous electrical input, these components address the stringent thermal and energy constraints inherent to untethered or densely packed soft robotic platforms. Standard pneumatic soft actuators typically operate within low-pressure ranges of 50 to 300 kilopascals (kPa), requiring valves that can rapidly and reliably sequence these modest pressures without overheating the adjacent delicate silicone or polyurethane structures.
Key Definitions for Pneumatic Soft Robots
While traditional pneumatic cylinders use rigid mechanics, fluidic elastomer actuators require complex, multi-channel pressure regulation to achieve nuanced kinematics. Solenoid coils provide the electromechanical actuation necessary to drive the valves regulating these pneumatic channels.
Unlike conventional coils, multi-stable variants utilize integrated permanent magnets or specialized mechanical latches to hold the valve’s armature in multiple positions without requiring a continuous electrical current. It is important to clarify a common terminology mismatch: most commercially available “multi-stable” pneumatic valves are actually bi-stable latching valves. True multi-stable coils—those capable of holding three or more intermediate positions—are highly specialized and rare, almost always requiring custom engineering rather than being off-the-shelf standards. In practice, proportional flow control is more commonly achieved using pulse-width modulation (PWM) driven mono-stable valves. However, when true multi-stable or bi-stable latching designs are used, they decouple the physical state of the valve from the continuous power consumption of the control system, allowing the robot to maintain a specific posture or grip indefinitely.
Use Cases in European Research and Automation
In European research and industrial automation, the integration of these advanced coils is driving innovation in several sectors. European Union-funded initiatives under the Horizon Europe framework frequently employ these components. For example, in concrete biomimetic handling programs like the SoftGrip project, autonomous soft grippers are developed for the agri-food industry, where robots must harvest delicate crops without bruising them.
In these use cases, engineering data from major European pneumatic vendors (such as Festo or Bürkert) indicates that a bi-stable latching valve assembly can reduce energy consumption by up to 80% during prolonged holding states compared to continuous-duty alternatives. Furthermore, in medical automation, miniature latching valves are utilized in wearable assistive devices and rehabilitation exoskeletons, where minimizing the thermal signature and maximizing battery life are paramount for patient safety and comfort.
Technical Specifications and Comparisons
The successful integration of multi-stable solenoid coils into pneumatic soft robotic manifolds depends heavily on matching technical specifications to the precise requirements of the fluidic actuators. Engineers must balance the physical size of the coil with its electromechanical output, ensuring the component can overcome internal valve friction and pneumatic backpressure while navigating magnetic and electromagnetic interference (EMI) challenges in densely packed pneumatic manifolds.
Force, Stroke, Voltage, Duty Cycle, and Response Time
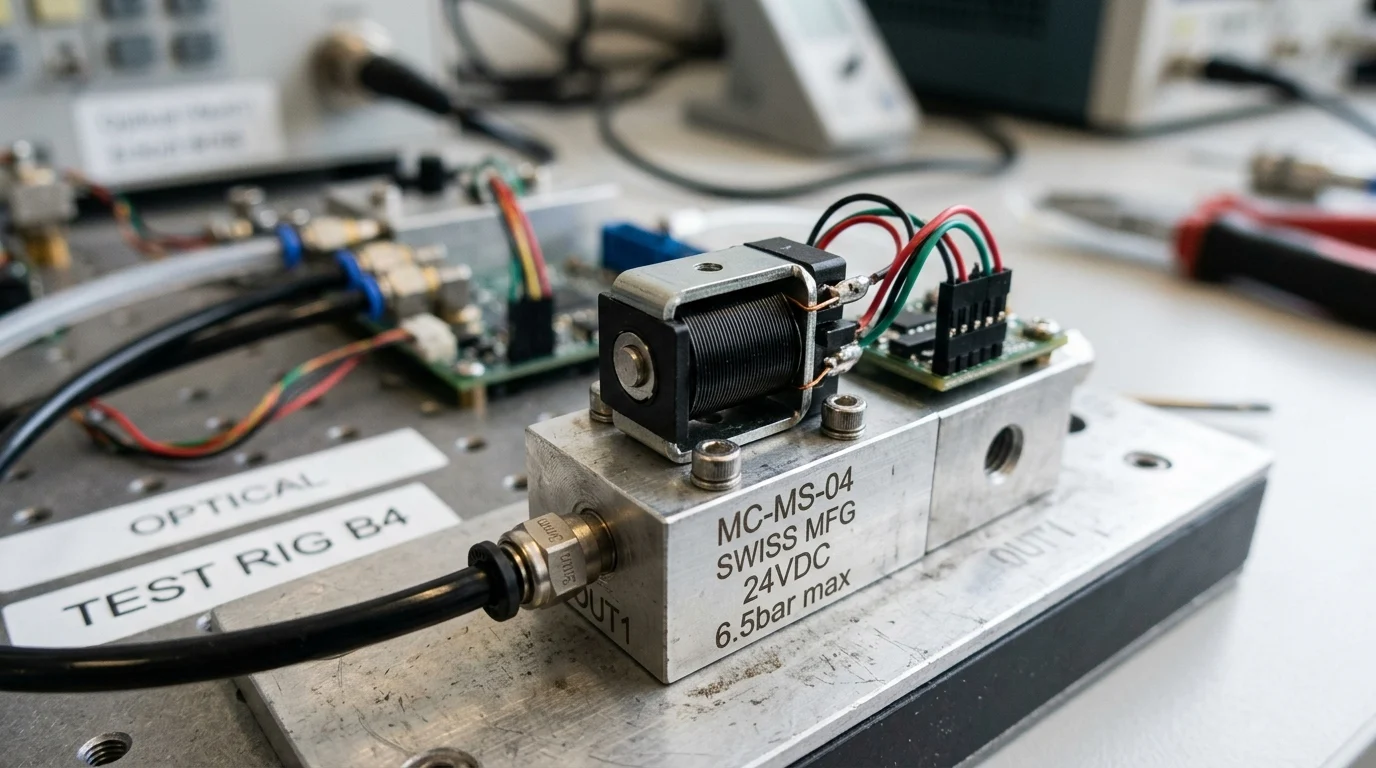
Several core specifications dictate the performance of a miniature solenoid coil in soft robotics. Force and stroke are primary mechanical considerations; industrial datasheets typically indicate miniature coils deliver actuation forces from 0.5 to 5.0 Newtons over highly constrained stroke lengths of 0.5 to 2.0 millimeters, though these figures carry wide uncertainty ranges based on specific application constraints. Voltage requirements in European automation standards are generally standardized at 12V or 24V DC.
Duty cycle is a critical metric for traditional coils, often rated at 100% ED for continuous operation. However, multi-stable designs operate on pulsed signals, meaning their effective duty cycle is a fraction of a percent, drastically reducing thermal output. Response time is equally critical for dynamic soft robotic control. Standard manufacturer specifications (e.g., from SMC or Parker Hannifin) show high-performance miniature mono-stable coils achieving actuation speeds between 5 and 15 milliseconds, though engineers must account for the slightly slower response times (typically 10 to 25 ms) inherent to latching designs when executing high-frequency fluidic logic.
Mono-Stable vs Bi-Stable vs Multi-Stable Designs
The choice between mono-stable, bi-stable, and multi-stable designs fundamentally alters the control architecture of a pneumatic soft robot. Mono-stable designs are the industry standard, utilizing a spring return mechanism that requires continuous electrical power to maintain the active state. Bi-stable designs rely on the aforementioned magnetic latching to hold the armature in either the open or closed position, requiring only a brief millisecond electrical pulse to switch states.
Multi-stable designs extend this principle, allowing the armature to be held at intermediate positions to enable complex manifold configurations with minimal power. However, utilizing latching and multi-stable designs introduces specific trade-offs: they require specialized drive circuitry to manage the pulsed signals and often lack intermediate positional feedback in simple bi-stable configurations. The table below outlines the primary operational differences between these designs in the context of soft robotic applications:
| Design Type | Power to Hold State | Typical Response Time | Thermal Generation | Ideal Soft Robotic Application |
|---|---|---|---|---|
| Mono-Stable | Continuous (100%) | 5 – 10 ms | High | High-frequency dynamic actuation (incl. PWM proportional control) |
| Bi-Stable | Zero (Magnetic/Mechanical Latch) | 10 – 20 ms | Low | Prolonged static gripping |
| Multi-Stable (Rare/Custom) | Zero (Magnetic/Mechanical Latch) | 15 – 25 ms | Very Low | Specialized proportional flow control, complex logic |
Sourcing, Validation, and Selection in Europe
Sourcing specialized electromechanical components for soft robotics within Europe requires a thorough understanding of regional regulatory frameworks, supply chain logistics, and component lifecycle expectations.
Key Takeaways
- Use miniature solenoid-actuated valves when pneumatic soft robots require precise airflow control inside compact manifolds or wearable platforms.
- Select bi-stable latching valves for long holding states because they can cut energy consumption by up to 80% compared with continuous-duty designs.
- Match valve response, heat output, and flow capacity to typical soft actuator pressures of about 50 to 300 kPa to protect silicone or polyurethane structures.
- Do not assume every “multi-stable” pneumatic valve provides multiple intermediate positions, because most commercial options are actually bi-stable latching designs.
- Consider PWM-driven mono-stable valves when proportional flow control is required and true multi-stable valve hardware is unavailable or too customized.
Frequently Asked Questions
Why are miniature solenoid valves important in pneumatic soft robots?
They regulate compressed air in compact spaces, enabling soft actuators to bend, grip, and release with precision while keeping hardware small enough for wearable, mobile, or densely packed robotic systems.
What does multi-stable mean in solenoid coil design?
A multi-stable coil can hold valve positions without continuous power, often using magnets or latching mechanisms. In practice, many commercial pneumatic options are bi-stable rather than truly multi-position.
How do latching valves reduce energy use?
Bi-stable latching valves need power mainly when switching states, not while holding them. In prolonged holding tasks, they can reduce energy consumption by up to 80% compared with continuous-duty valves.
What pressure range do many pneumatic soft actuators use?
Typical pneumatic soft actuators operate at relatively low pressures, often around 50 to 300 kPa, requiring valves that can sequence airflow reliably without excessive heat generation.
Where are these components used in European automation?
They appear in EU-backed soft robotics research, agri-food grippers for delicate harvesting, medical wearables, rehabilitation exoskeletons, and compact industrial automation systems needing efficient pneumatic control.
Post time: Jul-02-2026